
| 2D/3D Object Recognition & Categorization | |
 |
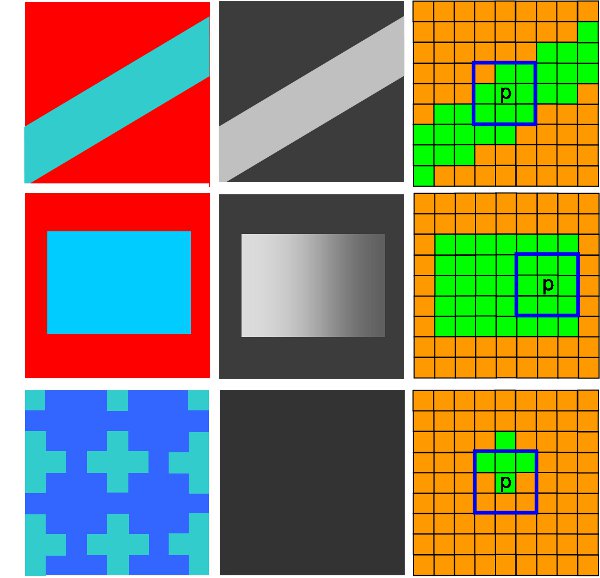
[2014] Interest points via Maximal Self-Dissimilarities
MSD is an interest point detector for images based on the intuition that image patches which are highly dissimilar from others over a relatively large extent of their surroundings are repeatable and distinctive. |
 |
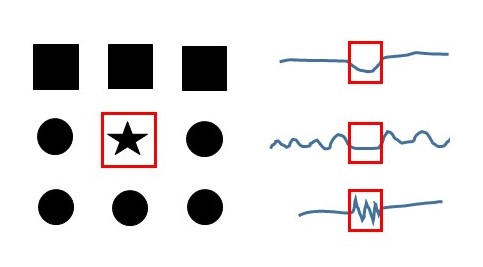
[2013] BOLD features for texture-less object detection
BOLD features are image descriptors specifically conceived to boost performance on texture-less object detection. At the same time, they are efficiently computable and able to deal with textured object surfaces as well. [Project Page] [Pdf (ICCV 13)]
|
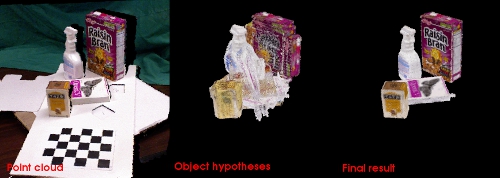 |
[2013] RGBD-D object recognition via multiple features
This work aims at RGB-D object recognition within clutter and occlusion by means of Global Hypothesis Verification as well as multiple types of features (3D local, 3D global, 2D local). [Pdf (ICRA 13)]
|
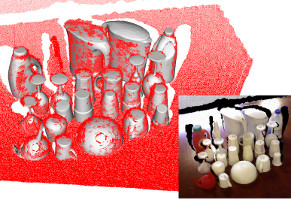 |
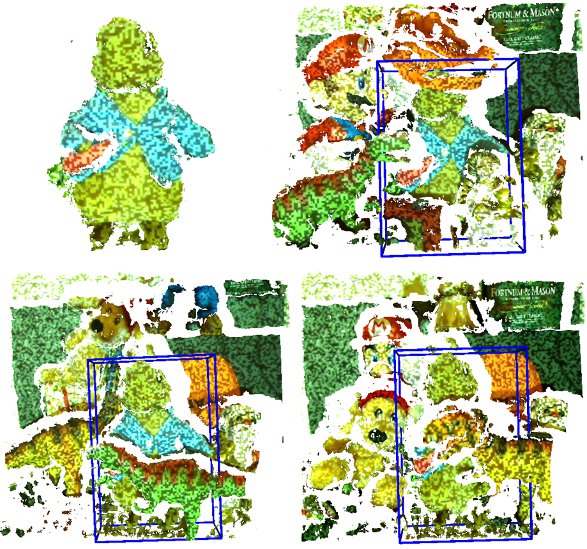
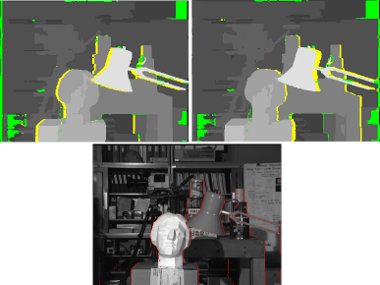
[2012] Hypothesis Verification for 3D Object Recognition
A robust Hypothesis Verification stage is demonstrated to dramatically improve the performance of 3D Object Recognition algorithms based on local and global features. The proposed method can work with high occlusion levels and was able to yield 100% recognition rate on a standard benchmark dataset for 3D Object Recognition. [Project Page] [Pdf (ECCV 12)]
|
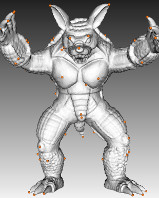 |
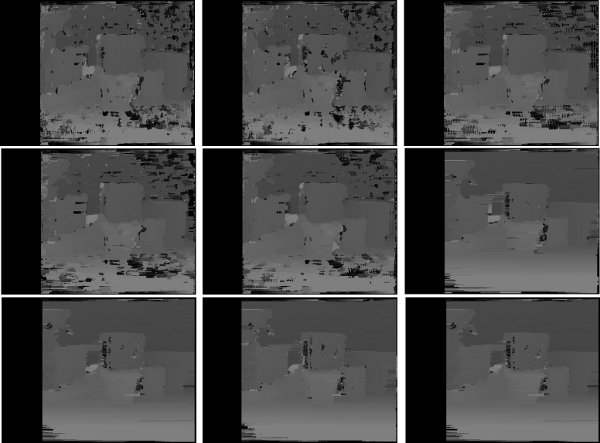
[2012] Performance evaluation of 3D keypoint detectors
The field of keypoint detectors has reached enough maturity to motivate a study including an analysis and classification of current methodologies and an experimental evaluation on different application scenarios. [Project page] [Pdf (3DIMPVT 11)]
|
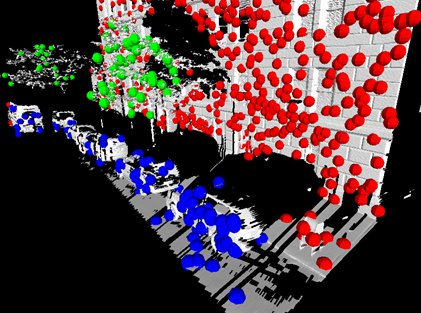 |
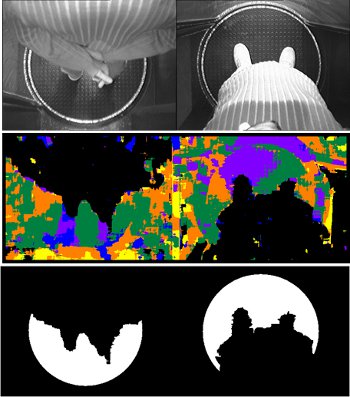
[2011] Semantic Segmentation of 3D data based on invariant features, Markov Random Field and general purpose classifiers. The proposed method has been tested on different scenarios (indoor/outdoor) and sensor data such as structured light (MS Kinect), stereo, LIDAR. |
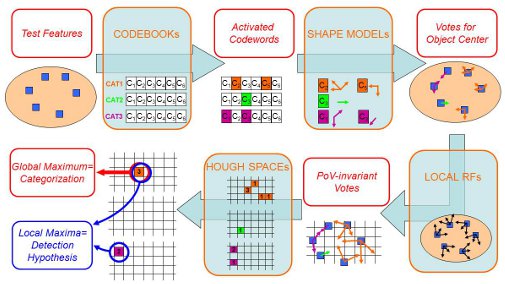 |
[2010] 3D Implicit Shape Models
Extension of the Implicit Shape Models (ISM) to object categorization of 3D data (TRISM)
[Pdf (ACCV 10)]
|
 |
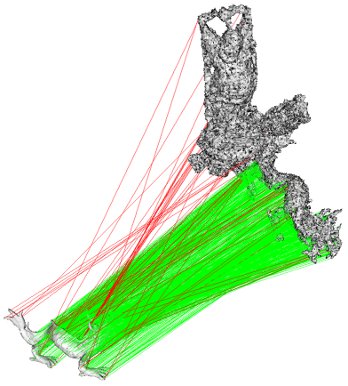
[2010] Hough-based Correspondence Grouping for 3D Object Recognition
We present a way to divide a set of 3D point-to-point correspondences into object hypotheses (correspondence grouping) for the task of 3D Object Recognition and 6DOF Pose Estimation in clutter and occlusion. This method relies on a novel Hough Voting scheme built over a 3D domain instead than on a 6D, with benefits in terms of sparseness of the solution and efficiency.
|
 |
[2010] Unique Shape Context (USC)
USC is a 3D descriptor that builds on and improves the performance of the “3D Shape Context” descriptor
[Pdf]
|
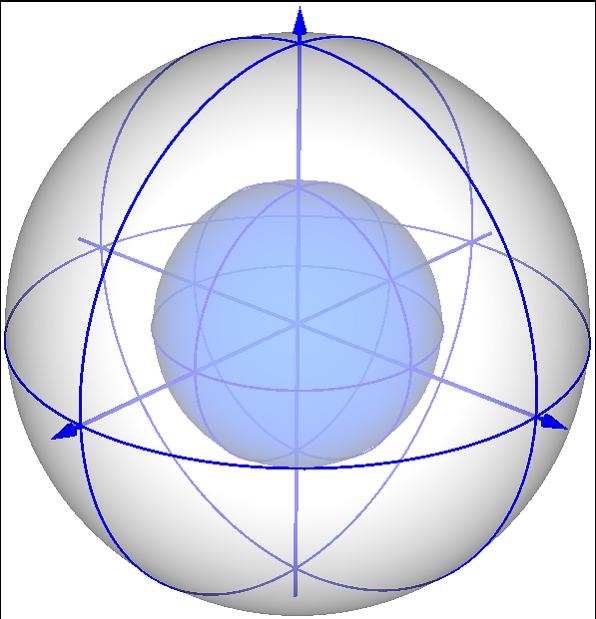 |
[2010] SHOT 3D Descriptor
SHOT is a novel 3D keypoint descriptor for robust surface matching under clutter and occlusion (ECCV 2010). SHOT has been later extended to handle RGB-D data as a joint Texture+Shape descritpor (Color-SHOT)
|
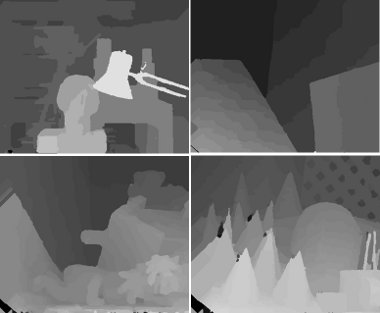
| Stereo Correspondence | |
 |
|
 |
|
 |
[Project Website] [Pdf]
|
 |
|
 |
|
| 3D acquisition and reconstruction | |
 |
|
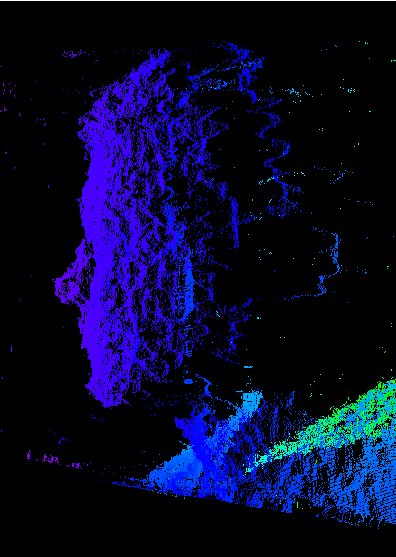 |
[Pdf]
|
| Video analysis for video-surveillance | |
 |
|
 |
[Pdf]
|
 |
[Pdf]
|
 |
|
 |
|
 |
[Pdf]
|
 |
|
[Pdf] |
|
| Fast exhaustive pattern matching and block matching | |
|
|
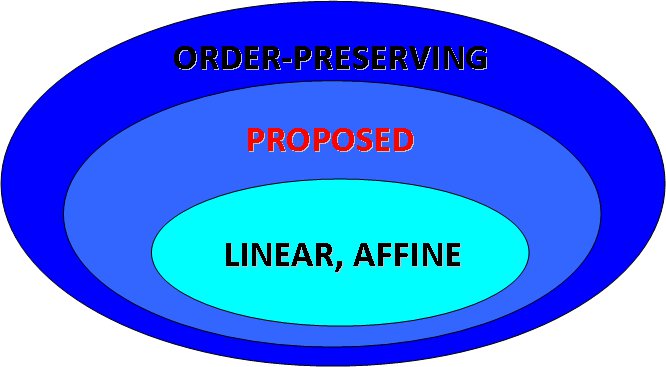
| Robust visual correspondence | |
 |
|
 |
|