of 3D urban scenes
This page provides qualitative results concerning automatic semantic segmentation of a public 3D dataset performed by means of the 3D segmentation technique proposed in [1]. The dataset concerns urban scenes, was acquired with a lidar sensor and was proposed for the "3DIMPVT 2011 Urban Data Challenge". These results constituted a contribution [2] accepted for the Demo/Short Paper session held within the 3DIMPVT 2011 Conference.
DOWNLOAD
The results can be downloaded as a unique zip file from this link:
Results (zip format)
EXAMPLE
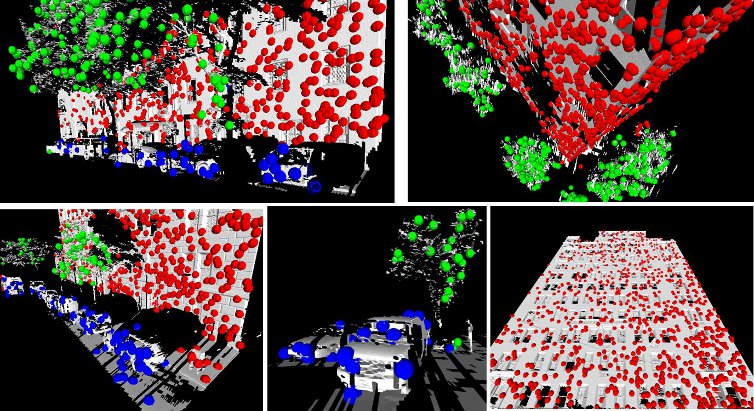
Below we show details of some scenes included in the test set of the evaluated dataset with the final segmentation yielded by the algorithm. Each scene is classified into 3 classes: facades (red), vegetation (green), vehicles (blue).
REFERENCES
[1] F. Tombari, L. Di Stefano, "3d data segmentation by local classification and markov random fields", 3DIMPVT '11, May 16-19, 2011, HangZhou, China
[2] F. Tombari, L. Di Stefano, "Automatic semantic segmentation of 3D urban scenes", Demo/Short Paper session @ 3DIMPVT '11, 2011