6 stereo-pairs with groundtruth
This page provides a stereo dataset composed of 6 stereo-pairs with groundtruth acquired by Federico Tombari and Andrea Mainetti. The groundtruth was obtained by means of an active stereo technique (space-time stereo): details concerning the setup used for the acquisition can be found in [1]. In addition to groundtruth, each stereo pair comes with a binary mask that indicate erroneous pixels in the provided ground-truth mask: this can be useful, e.g., to evaluate quantitatively a disparity map by comparing it with the provided groundtruth.
This dataset was presented in the stereo evaluation proposed in [2]. If you use this dataset for scientific or research purposes, please cite appropriately this webpage and [2]. For any question feel free to write me at: federico (DOT) tombari (AT) unibo (DOT) it
DOWNLOAD
The dataset can be downloaded as a unique zip file from this link:
Dataset (zip format)
EXAMPLE
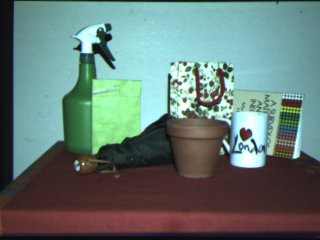
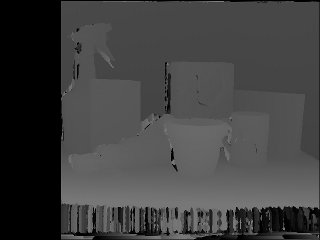
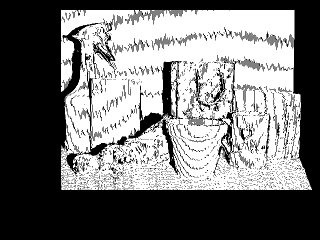
Below we show one of the 6 stereo-pairs of the dataset including Left Image, Right Image, ground-truth and binary mask.
Left Image Right
ImageGround Truth Mask
REFERENCES
[1] F. Tombari, L. Di Stefano, S. Mattoccia, A.Mainetti, "A 3D reconstruction system based on improved Spacetime Stereo", 11th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV 2010), December 7-10, 2010, Singapore
[2] F. Tombari, S. Mattoccia, L. Di Stefano, "Stereo for robots: quantitative evaluation of efficient and low-memory dense stereo algorithms", 11th Int. Conf. on Control, Automation, Robotics and Vision (ICARCV 2010), December 7-10, 2010, Singapore