Left image (Left) and ground truth (Right)

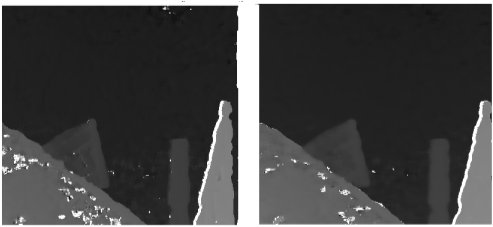
Disparity map with SMP (Left) and BM (Right)
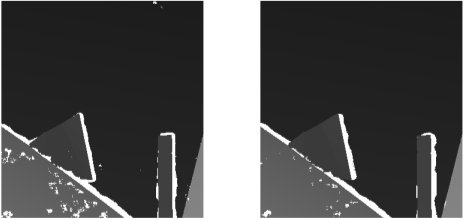
Incorrect measurements with SMP (Left) and BM (Right)
The single matching phase SMP approach is described in the [1] and details concerning the SIMD implementation can be found in [2].
The bidirectional matching (BM) approach is described in [3].
The "Tsukuba", "Map", "Sawtooth", "Venus", "Barn1", "Barn2", "Bull" and "Poster" stereo pairs are available in [4 ] and used in [5].
References
[1] L.
Di Stefano, M. Marchionni, S. Mattoccia
“A Fast Area-Based
Stereo Matching
Algorithm”
Image
and Vision Computing 22(12)
pp 983-1005, October 2004
[Abstract]
[Pdf]
[Bibtex]
[2] L. Di Stefano,
M. Marchionni, S.
Mattoccia
"A PC-based Real-Time Stereo Vision System"
Machine GRAPHICS
& VISION 13(4) pp 197-220,
2004
[Abstract]
[Pdf]
[Bibtex]
[3] K.
Konolige
"Small Vision Systems: Hardware and Implementation"
Eighth International Symposium on Robotics Research
Hayama, Japan, October 1997
"Small Vision Systems: Hardware and Implementation"
Eighth International Symposium on Robotics Research
Hayama, Japan, October 1997
[5] D.
Scharstein and R. Szeliski.
"A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms"
IJCV 47(1/2/3):7-42, April-June 2002
Microsoft Research Technical Report MSR-TR-2001-81, November 2001
"A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms"
IJCV 47(1/2/3):7-42, April-June 2002
Microsoft Research Technical Report MSR-TR-2001-81, November 2001
last update : October 26, 2005